

Sistemas de referencia giratorios
La sección que aquí empieza es el desarrollo matemático que permite calcular las fuerzas ficticias a las que se someten los pasajeros de la estación espacial (es decir, las fuerzas que aparecen a un observador que se encuentra en un sistema de referencia que gira).
Si no te ves con ganas de seguirlo (cosa que te desaconsejo) puedes ir a la siguiente sección. Pero si lo haces te quedarás sin saber de dónde salen las fórmulas. Yo creo que el nivel de este desarrollo es de 2º de Bachillerato (al menos la fuerza centrípeta). Como mucho es de primer nivel de una carrera como física o ingeniería.
Si sigues leyendo esta sección, enhorabuena. El mundo es de los valientes que se preguntan por el cómo de las cosas (lo del porqué se lo dejamos a Aristóteles).
Vamos a ello…
Si recuerdas de tus días del instituto sabrás que en los sistemas inerciales (los que están en reposo o se mueven a una velocidad constante) las ecuaciones de las leyes del movimiento (leyes de Newton) toman una forma muy simple.
Pero a veces resulta mucho más conveniente para algunos sistemas físicos describirlos en otro tipo de sistema de referencia. Particularmente un sistema que rota conviene describirlo en un sistema de referencia que rote .
Un eje de giro define una dirección privilegiada en el espacio (esto puede parecer una perogrullada). Definimos el vector velocidad angular como el vector cuyo módulo es el valor absoluto de la velocidad de giro y con dirección la del eje de giro y sentido el que tendría un tornillo dextrógiro (vamos, uno normal) que girara en el mismo sentido.

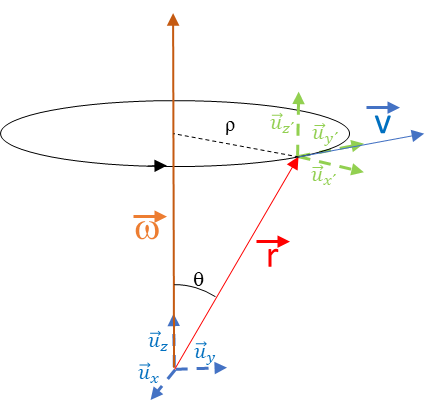
En la figura anterior podemos ver que el vector r (origen del Sistema de referencia O’ que gira respecto al O) gira alrededor del eje uz con una velocidad angular ω. La velocidad v viene dada por el producto vectorial de los dos vectores, ω y r.

No vamos a demostrar esto pero fíjate que el objeto en r traza un círculo de radio ρ [ = |r| * sin(θ) ] con una velocidad angular ω. Y esa es la definición de producto vectorial.
Imaginad un vector en el espacio r referido al sistema de referencia que no gira (ux , uy , uz). En ese sistema podemos escribir

Y la velocidad medida por el sistema inercial (que no gira) O es

De igual modo el vector r en el sistema no inercial (que gira) O’

Y la velocidad medida por el sistema no inercial O’ es

Para un observador en el sistema O los vectores unitarios del sistema O’ rotan (varían) por lo que si deriva la ecuación [3]

Los vectores (ux’ , uy’ , uz’) giran respecto a O con velocidad angular ω por lo que usando [0]

Así que utilizando [6] los tres últimos términos de [5] podemos escribirlos así

Reescribimos [5] con lo obtenido en [7] y usando las igualdades [2] y [4]

A partir de aquí vamos a obtener la aceleraciones observadas por cada observador (el del sistema inercial O y el del sistema no inercial O’)
La aceleración observada por O será

y la observada por O’

Si derivamos [8] (recordad que hemos supuesto que el sistema gira pero con una velocidad angular constante)

de [4] obtenemos para el observador O’

los tres primeros términos son a’ (ver [10]) y los tres restantes son (a semejanza de [7])

Así que por [10] y [13]

De [2] y [8]

por lo que


Hemos llegado a una fórmula donde se relaciona la aceleración medida en un sistema inercial con la medida en un sistema no inercial. Observamos que aparecen dos términos que asociaremos (por la segunda Ley de Newton) a dos fuerzas.
Esas fuerzas no existen para el observador inercial (uno que está en reposo o se mueve a velocidad constante). Son dos fuerzas que un observador no inercial (que se mueve con aceleración y girar es estar acelerado por que hay variación de velocidad) debe usar para poder describir el movimiento de los objetos que observa.
El primer término es lo que se denomina aceleración de Coriolis.
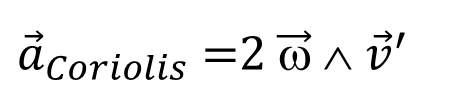
Esa aceleración aparece en cuerpos que se mueven en el sistema de referencia que gira (depende de v’) y puede interpretarse como originada por una fuerza que es perpendicular a la velocidad del objeto y la velocidad de rotación.
El primer término es lo que se denomina aceleración centrípeta



Deja un comentario